Лабораторная работа № 2
Исследование характеристик коллекторного двигателя постоянного тока
Цель лабораторной работы: изучение статических характеристик и характера переходных процессов в двигателе постоянного тока с независимым возбуждением от постоянных магнитов при изменении управляющего напряжения, внешнего силового воздействия, а также в зависимости от соотношения значений основных параметров двигателя.
Задачи лабораторной работы
· приобретение навыков формирования математических моделей исполнительных двигателей электромеханических систем как динамических объектов с помощью средств системы визуального моделирования Simulink на примере модели коллекторного двигателя постоянного тока (ДПТ) с возбуждением от постоянного магнитного поля;
· изучение характера переходных процессов в ДПТ и определение электромагнитной и электромеханической постоянных времени двигателя путем проведения вычислительных экспериментов;
· исследование свойств ДПТ в установившихся режимах работы;
· определение регулировочной характеристики ДПТ при непрерывном регулировании напряжения, подаваемого на якорную цепь двигателя;
· определение механической характеристики ДПТ при изменении назрузочного момента;
· исследование зависимости динамических свойств ДПТ от момента инерции ротора и приведенного момента инерции объекта управления.
Порядок выполнения лабораторной работы
1. Запустите Matlab и откройте окно для создания модели Simulink. С помощью мыши «перетащите» нужные модули из библиотеки Simulink на рабочее поле модели и соедините их линиями связи в соответствии со структурной схемой модели двигателя постоянного тока. Присвойте имя программной модели и сохраните ее в каталоге, указанном преподавателем.
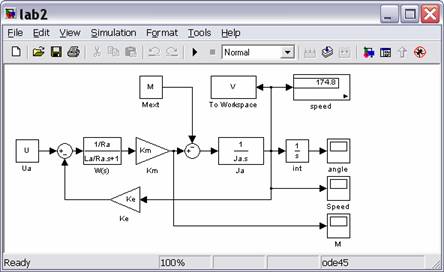 Рис.1
Рис.1
Числовые значения параметров модели ДПТ для своего варианта задайте как переменные в окне Command Window[1] в соответствии с в таблицей.
clear % Очистка
Workspase
Ra=4.0; % Активное
сопротивление обмотки якоря
La=0.004; %
Индуктивность обмотки якоря
Ja=0.00002; % Момент инерции ротора
Km=0.057; % Коментный
коэффициент двигателя
Ke=0.057; %
Коэффициент противоЭДС
Unom=24; %
Номинальное напряжение двигателя
Umax=40; %
Напряжение источника энергии
Mnom=0.2; %
Номинальный момент двигателя
|
Двигатель |
Uном |
n ном |
Iном |
Rя, |
Тэ |
Jдв, |
kе, |
|
В |
об/мин |
A |
Ом |
мс |
кгм2 |
Вс/рад |
|
|
ДПР62Н1-02 |
27 |
6000 |
0,72 |
4 |
1 |
3,60*10-6 |
0,043 |
|
ДПР72Н1-07 |
12 |
4500 |
2,20 |
0,56 |
0,65 |
7,80*10-6 |
0,025 |
|
ПЯ250Ф |
36 |
3000 |
9,50 |
1 |
1 |
2,92*10-4 |
0,115 |
|
ДПУ200 |
92 |
3000 |
7,40 |
1,53 |
1,1 |
7,80*10-4 |
0,293 |
|
ДП40 |
24 |
4000 |
2,90 |
1,45 |
1 |
1,27*10-4 |
0,057 |
|
ДП50 |
24 |
4000 |
5,30 |
0,28 |
1,5 |
6,08*10-4 |
0,057 |
2. Снимите переходной процесс изменения угловой скорости вала двигателя w и тока якоря Iя при ступенчатом изменении напряжения Uя. Для этого введите номинальное значение Uя, указанное в табл.1, и задайте нулевое значение возмущающего момента Mв от внешних сил. Установите необходимые значения параметров процесса моделирования, раскрыв поочередно разделы Simulation и Parameters. Общее время моделирования рекомендуется принимать приблизительно равным 4Тм. Предварительно необходимо вычислить значения электромагнитной и электромеханической постоянных времени рассматриваемого ДПТ.
 ,
, 
3. Получите и зарисуйте переходные процессы скорости и тока при номинальном значении напряжения якоря и внешнем моменте, равном нулю.
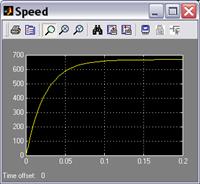
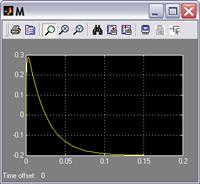
4. Определите по полученным графикам время переходного процесса Тпп[2] скорости двигателя w и перерегулирование s[3]. Сопоставьте установившееся значение скорости вала двигателя со значением, которое ожидается на основании теоретических положений. Дайте объяснение характеру изменения тока якоря.
Примечание: Для апериодического процесса справедливо соотношение Tпп » 3t.
5. Определите значение электромеханической постоянной времени двигателя Тм по переходному процессу угловой скорости вращения вала двигателя. Сопоставьте полученное значение с ожидаемым значением, вычисленным теоретически. Если эти значения отличаются, объясните, чем это может быть вызвано.
6. Приложите к валу внешний момент Mвн=-0.5Мп и Mвн=0.5Мп, где Мп - расчетное значение пускового момента двигателя. Получите переходные процессы скорости и тока якоря. Приведите графики в отчете.
Как изменяется характер переходных процессов при действии внешнего возмущающего момента? Как влияет Мв на установившиеся значения скорости и тока?
7. Изучите влияние момента инерции подвижных частей, приведенных к валу двигателя, на динамические свойства ДПТ (Mвн=0).
Для этого рассмотрите переходные процессы при ступенчатом изменении напряжения на якоре, при значении момента инерции на валу ротора: J=Ja, J=2Ja и J=4Ja .
Последний два варианта означают, что вал двигателя связан с объектом, обладающим приведенным к валу ДПТ моментом инерции, равным моменту инерции ротора и превышающим его в 3 раза, соответственно.
Как изменяются Тпп , s, ω(∞) и тока якоря ?
Зафиксируйте в отчете и объясните результаты.
8. Путем вычислительного эксперимента определите значение электромагнитной постоянной времени двигателя Тэ. Для этого необходимо рассмотреть переходные процессы при заторможенном вале двигателя. Поэтому измените структуру программы моделирования таким образом, чтобы внешний момент был равен электромагнитному моменту двигателя. Значение Тэ определите непосредственно по графику переходного процесса тока якоря и сопоставьте со значением, полученным на основании теоретического расчета. Объясните результаты.
9. Повторить предыдущий опыт при значениях напряжения управления, равных 50% и 25% от номинального напряжения. Зафиксируйте результаты и сделайте вывод о влиянии напряжения управления Uя на скорость и ток двигателя. Изменяются ли значения Тпп и s ?
10. Постройте по 5 точкам (Uя=-Uном÷Uном) регулировочную характеристику двигателя при Mвн=0.
|
|
-Uном |
-0,5Uном |
0 |
0,5Uном |
Uном |
|
ω(∞) |
|
|
|
|
|
11. Постройте по 5 точкам (Mвн = -Mп÷Mп) механическую характеристику двигателя при Uя=0.5Uном.
|
|
-Mп |
-0,5Mп |
0 |
0,5Mп |
Mп |
|
ω(∞) |
|
|
|
|
|
12. Постройте семейства механической и регулировочной характеристик ДПТ. Для этого проведите автоматизированную серию вычислительных экспериментов при значениях напряжения якоря и значениях внешнего момента приведенных в таблице:
|
|
-1,5Uном |
-Uном |
-0,5Uном |
0 |
0,5Uном |
Uном |
1,5Uном |
|
-1,5Mп |
|
|
|
|
|
|
|
|
-Mп |
|
|
|
|
|
|
|
|
-0,5Mп |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
0,5Mп |
|
|
|
|
|
|
|
|
Mп |
|
|
|
|
|
|
|
|
1,5Mп |
|
|
|
|
|
|
|
Для этого воспользуйтесь программой:
clear % Очистка
Workspase
Ra=4.0; % Активное
сопротивление обмотки якоря
La=0.004; %
Индуктивность обмотки якоря
Ja=0.00002; % Момент инерции ротора
Km=0.057; % Коментный
коэффициент двигателя
Ke=0.057; %
Коэффициент противоЭДС
Unom=24; %
Номинальное напряжение двигателя
Umax=40; %
Напряжение источника энергии
Mnom=0.35; % Номинальный момент двигателя
Nu=7; % Число
точек Uдв, нечетное
Nm=7; % Число
точек Mвн, нечетное
% Выполнение расчетов
for j=1:Nu,
% Цикл изменения Uя
j1=j-(Nu+1)/2;
U=Unom*2*j1/(Nu-1);
U1(j)=U;
for i=1:Nm, % Цикл изменения Mвн
i1=i-(Nm+1)/2;
M=Mnom*2*i1/(Nm-1); M1(i)=M;
sim('lab2.mdl',0.20),
n=size(V); % Размерность вектора
Au(j,i)=V(n(1)), % Заполнение
массива
Am(i,j)=V(n(1)), % Заполнение
массива
end
end
% Вывод графика "Семейство регулировочных
характеристик"
figure(1); set(1,'Name','Семейство регулировочных
характеристик');
plot (U1,Au); GRID;
title ('Семейство регулировочных характеристик')
Xlabel('Напряжение на якоре двигателя, V')
Ylabel('Установившаяся скорость вращения, 1/s')
legend('Mext=','Mext=','Mext=','Mext=0','Mext=','Mext=','Mext=')
% Вывод графика "Семейство нагрузочных
характеристик"
figure(2); set(2,'Name','Семейство нагрузочных
характеристик');
plot (M1,Am); GRID;
title ('Семейство нагрузочных характеристик')
Xlabel('Внешний момент, Nm')
Ylabel('Установившаяся скорость вращения, 1/s')
legend('Ua=','Ua=','Ua=','Ua=0','Ua=','Ua=','Ua=')
Изучите приведенную программу. Обработайте полученные графики. Если надписи не читаемы, примените к ним шрифт GOST type A.
Сделайте выводы по результатам построения механической и регулировочной характеристик ДПТ.
13. Оформите отчет, в который включите схемы моделирования, исходные данные, все полученные числовые оценки, графики процессов и выводы по результатам проведенной лабораторной работы.